7、根據電池的其它特性進行SOC估計: 比較交流內阻和直流內阻。 電池直流內阻與SOC關系(測量溫度為25℃,HPPC測試方法) 8、基于以上2種或多種的集成算
7、根據電池的其它特性進行SOC估計:
比較交流內阻和直流內阻。
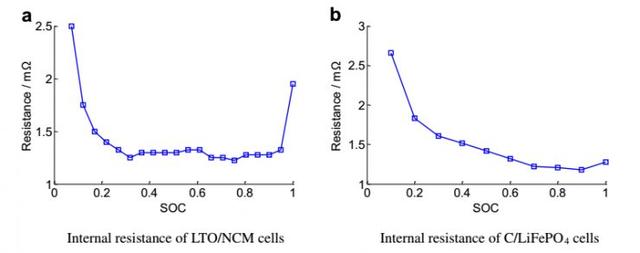
電池直流內阻與SOC關系(測量溫度為25℃,HPPC測試方法)
8、基于以上2種或多種的集成算法:
目前集成算法包括簡單的校正,加權融合算法,卡爾曼濾波(或者擴展卡爾曼濾波,EKF),滑模觀測器等。
簡單的校正集成算法主要包括:
1.) 安時積分算法和開路電壓校正:安時積分算法充滿后對SOC進行標定等。
對于純電動汽車:a. 工作條件簡單,在車輛行駛過程中,除了再生制動,主要處于放電狀態,當車輛在充電過程中,電池處于充電狀態,開路電壓的遲滯很容易進行建立。b. 電池包的容量比較大,安時積分相對與電池包容量來說還是比較小。c. 滿充的概率比較大,通過開路電壓對初始SOC的標定,能夠滿足純電動車SOC的精度要求。
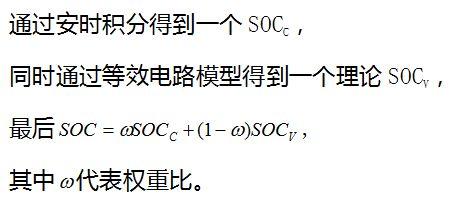
2.) 加權融合算法:
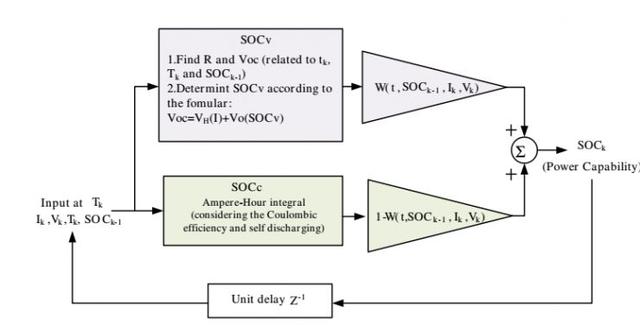
圖7 加權融合算法
目前加權融合算法已經運用在通用公司混動汽車上。
不同的SOC算法的比較如下表:
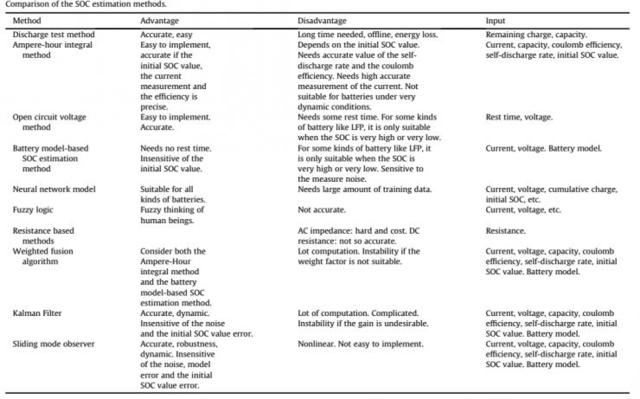
SOC算法特點比較
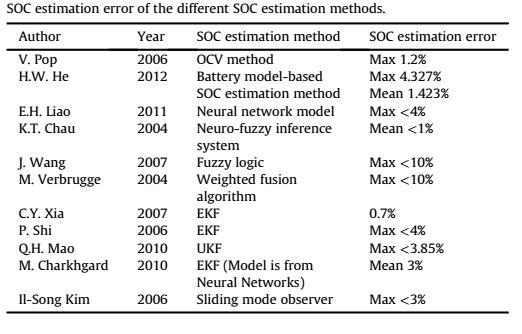
SOC算法精度比較
BMS是管理和控制動力電池工作在合適的溫度和電壓范圍內在,可以看出BMS對于電動車輛續航里程、電池壽命、電池安全性的重要性。
今天對BMS的硬件架構和軟件功能,以及重要關鍵點SOC的幾種算法,及其相關復雜度以及算法精度進行了簡單介紹。后續我們會對NCA、NCM、LFP電壓遲滯以及SOC的算法基礎OCV~SOC曲線變化情況再進行進一步討論探討,歡迎大家一起交流。

 電池網微信
電池網微信